 |
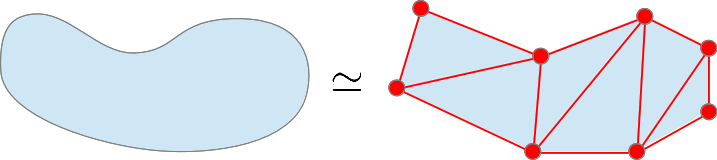
| An object modeled as a mesh. |
|
| An object modeled as a mesh. |
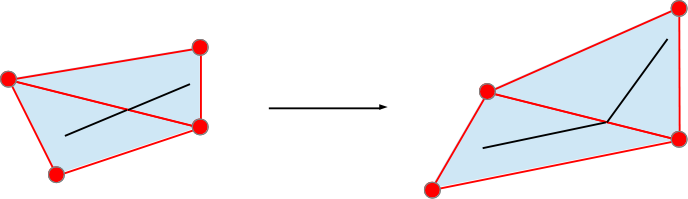 |
| FE continuity. Linear shape
functions create non-smooth deformations. |
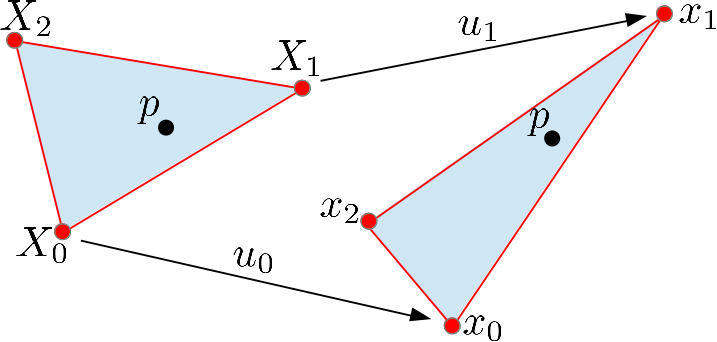 |
| A Finite Element. Left: the reference configuration. Right: the displaced configuration. |
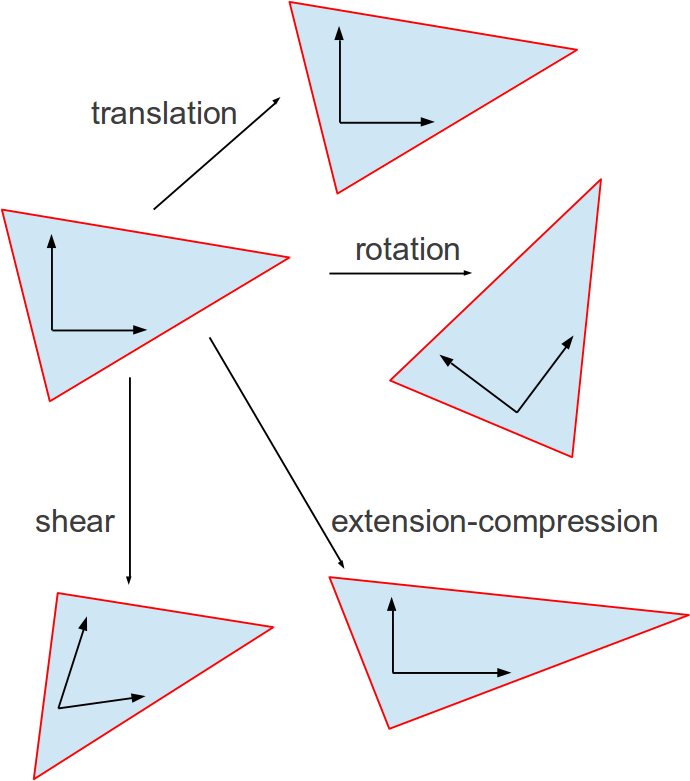 |
| The four displacement modes of a
material element. |
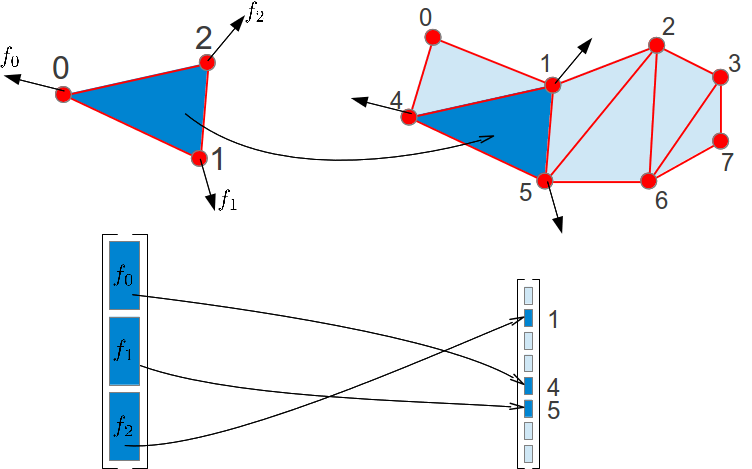 |
| Force vector assembly. The force
vector of an element (dark blue) is split and accumulated to the global
force vector (light blue) based on the node indices. |
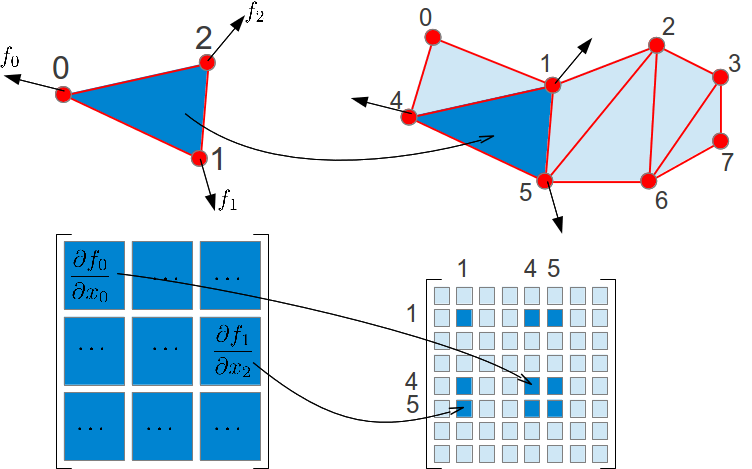 |
| Stiffness matrix assembly. The
stiffness matrix of an element (dark blue) is split and accumulated to
the global stiffness matrix (light blue) based on the node indices. |